Crowdsourcing eHMI Designs: A Participatory Approach to Autonomous Vehicle-Pedestrian Communication (RO-MAN 2025)
Post's content provided by: Ronald
Authors: Ronald Cumbal, Didem Gürdür Broo and Ginevra Castellano
We recently explored how crowdsourcing platforms can be used to design external Human–Machine Interfaces (eHMIs) for
autonomous vehicles (AVs). These interfaces are key for helping AVs communicate clearly with pedestrians. Participatory
design, where users are directly involved in shaping technology, is a well-established method. However, applying crowdsourcing
to this process, while still aiming for meaningful engagement, is not something we often see. That’s what makes our approach
a little different.
We presented this work at the RO-MAN Conference in Eindhoven, NL, August 2025. One of the biggest advantages of using crowdsourcing is scalability in participant recruitment. With larger groups, we were able to run statistical tests and uncover significant results, something that’s rarely possible in smaller, traditional participatory studies. For example, here’s what we found about user preferences for the types of information and design elements interfaces should include. The results show clear statistical differences marked with dashed lines:

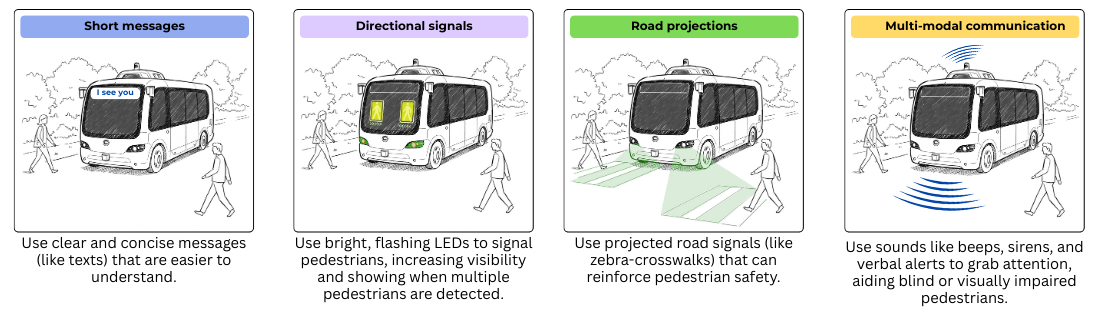
The main outcome of our work points toward a clear preference of participants to use familiar, established and common elements that produce clear and easily interpretable messages. This pushes a debate on how to balance familiarity with novelty when designing new technology. As AVs need to convey clear information to guarantee safe interactions, we argue that familiarity should remain a stronger focus when deploying AVs to the real world. The following Figure shows a summary of the elements that were frequently suggested by all participants:
Event Gallery
